卡尔曼滤波的具体原理, 导语:卡尔曼滤波是一种利用线性系统的状态方程,最终系统输入输出观测数据来获得最优解的算法。但是在观测过程中可能会有一些干扰,即使是最优的结果也会有误差。下面我们来详细了解一下卡尔曼滤波。
卡尔曼滤波的具体原理
斯坦利施密特正式发现卡尔曼滤波器。当时,他在美国宇航局艾姆斯研究中心时,发现他的方法对解决阿波罗计划的轨道预测很有用,后来他根据自己的研究发表了相关论文。
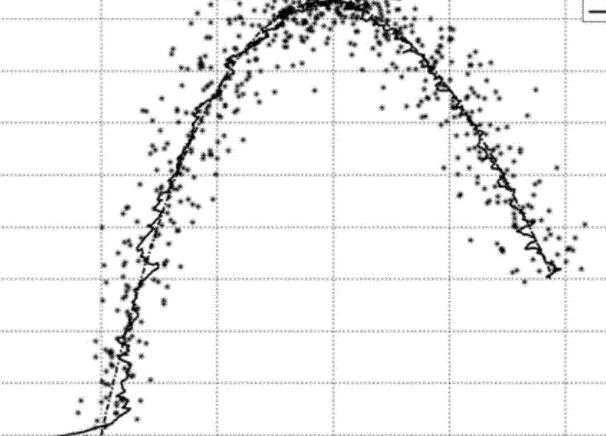
所谓数据滤波,就是一种能够成功去除噪声,还原真实数据的特殊方法。当测量方差已知时,这种特殊滤波可以更好地估计动态系统。
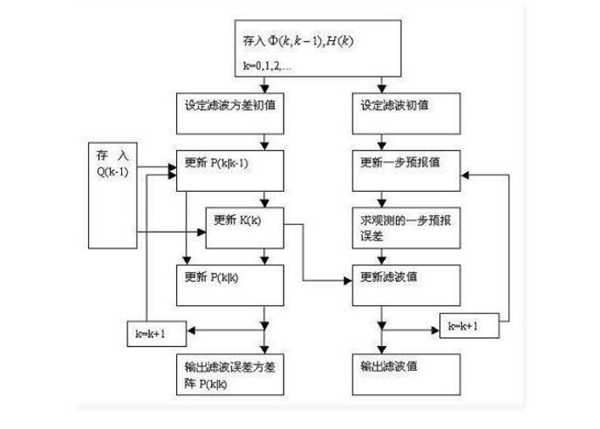
卡尔曼滤波器的完整实施例
要知道,传统的滤波方法只有在信号和噪声的频带不同时才能实现。卡尔曼滤波是一种比较新的预测方法,比以前的方法更有效。
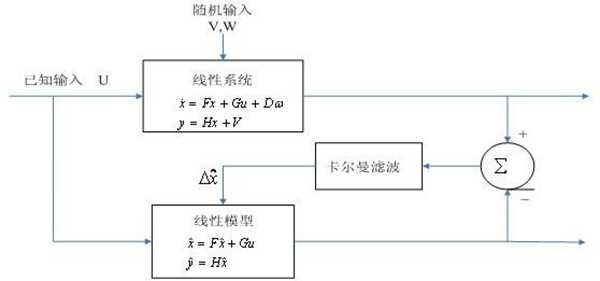
这种理论是在时域上表达的,主要是以线性系统的状态空间为基础,最终可以得到系统状态的最优估计。最后,你可以成功地理解完整的行为。
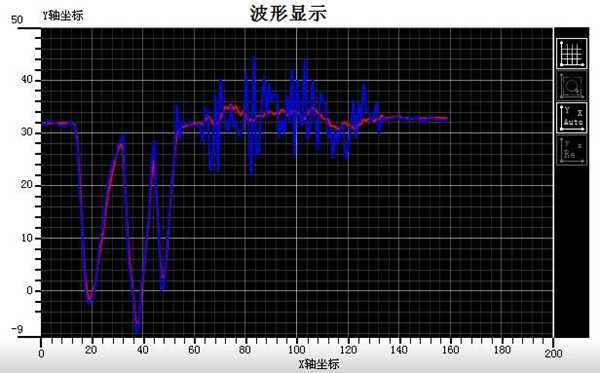
卡尔曼滤波器不要求信号和噪声都是稳定的。只要有一定的假设,最后对含噪信号进行处理,就可以得到误差最小的估计结果,比以前简单方便得多,因此也得到了极大的认可。
自卡尔曼滤波器正式问世以来,已经在通信系统、电力系统、航空航天等领域得到了广泛的应用,并取得了很多成果。
结论:卡尔曼滤波在特定领域还是有用的,但需要注意的是,它只是一种方便的算法,在很多相关领域都可以计算。
卡尔曼滤波的具体原理,以上就是本文为您收集整理的卡尔曼滤波的具体原理最新内容,希望能帮到您!更多相关内容欢迎关注。
未经允许不得转载:探秘猎奇网 » 卡尔曼滤波的具体原理(卡尔曼滤波 参数)
 河流为何都是弯的(河流为什么是弯曲的物理解释)
河流为何都是弯的(河流为什么是弯曲的物理解释) 土豆的多种吃法(土豆的多种吃法晒图)
土豆的多种吃法(土豆的多种吃法晒图) 月球是外星人的监视器(书名:月球是外星人的监视器)
月球是外星人的监视器(书名:月球是外星人的监视器) 全球变暖开启西伯利亚地狱之门(全球变暖西伯利亚降雨增加)
全球变暖开启西伯利亚地狱之门(全球变暖西伯利亚降雨增加) 左金保离任长信医疗保健混合
左金保离任长信医疗保健混合 发现已知最远星系(发现最遥远的已知星系)
发现已知最远星系(发现最遥远的已知星系) 蜂蜜水什么时候喝最佳(蜂蜜水什么时候喝效果最佳)
蜂蜜水什么时候喝最佳(蜂蜜水什么时候喝效果最佳) 桃子最好吃的三个品种(桃子品种排名前十名)
桃子最好吃的三个品种(桃子品种排名前十名)